
Six-DoF Haptic Rendering of Contact between Geometrically Complex Reduced Deformable Models
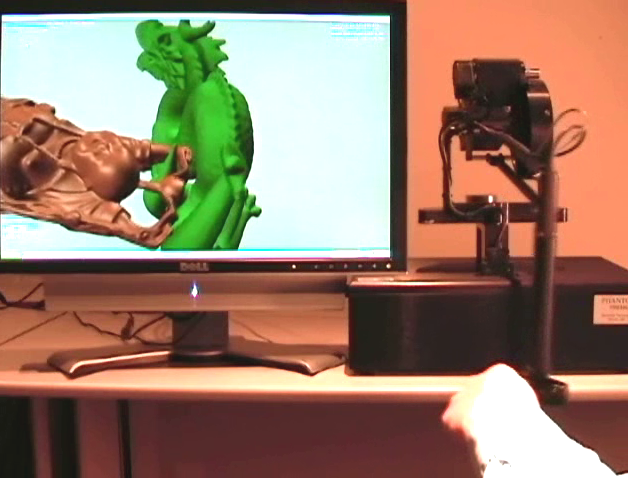
This paper shows how to simulate haptic contact between a rigid object and a reduced FEM deformable object, both with complex geometry. Deformable object
simulation, deformable collision detection and contact force and torque computations all run together at haptic rates (1000 Hz). In our subsequent journal paper (also available on this page), we extended the method to contact between two reduced deformable objects.
This paper won the best paper-and-presentation award at the Symposium for Computer Animation (SCA) in San Diego, CA, August 2007.
People
- Jernej Barbič
- Carnegie Mellon University
- Doug L. James
- Cornell University
Abstract
Real-time evaluation of distributed contact forces for rigid or deformable 3D objects is important for providing multi-sensory feedback in emerging real-time applications, such as 6-DoF haptic force-feedback rendering. Unfortunately, at very high temporal rates (1 kHz for haptics), there is often insufficient time to resolve distributed contact between geometrically complex objects.
In this paper, we present a spatially and temporally adaptive sample-based approach to approximate contact forces under hard real-time constraints. The approach is CPU based, and supports contact between a rigid and a reduced deformable model with complex geometry. Penalty-based contact forces are efficiently resolved using a multi-resolution point-based representation for one object, and a signed-distance field for the other. Hard real-time approximation of distributed contact forces uses multi-level progressive point-contact sampling, and exploits temporal coherence, graceful degradation and other optimizations. We present several examples of 6-DoF haptic rendering of geometrically complex rigid and deformable objects in distributed contact at real-time kilohertz rates.

Citations
- Jernej Barbič and Doug L. James: Six-DoF Haptic Rendering of Contact between Geometrically Complex Reduced Deformable Models, IEEE Trans. on Haptics, 1(1), 2008, p. 39-52 [BiBTeX].
- Jernej Barbič and Doug L. James: Time-critical distributed contact for 6-DoF haptic rendering of adaptively sampled reduced deformable models, ACM SIGGRAPH / Eurographics Symposium on Computer Animation (SCA) 2007, San Diego, CA, August 2007, p. 171-180 [BiBTeX].
Project material
- Journal paper in IEEE Transactions on Haptics, 1(1), 2008 (PDF; 10 Mb)
(includes defo-defo contact, more experiments, and improved text; recommended) - SCA 2007 Paper (PDF; 4 Mb)
- Video:
- QuickTime (MP4; 44 Mb)
- DivX (AVI; 43 Mb)
- Defo-defo contact; DivX (AVI; 8 Mb)
- Defo-defo contact; QuickTime (MP4; 12 Mb)
- Haptic demo (executables!)
- Presentation slides (SCA 2007 and special session of SIGGRAPH 2007 (best two papers from SCA); zipped ppt; 82 Mb)
- PhD thesis (Jernej Barbič): Real-time Reduced Large-Deformation Models and Distributed Contact for Computer Graphics and Haptics (pdf; 22 Mb)
Related projects
- Real-Time Subspace Integration for St.Venant-Kirchhoff Deformable Models
- BD-Tree: Output-Sensitive Collision Detection for Reduced Deformable Models
Funding

This research is supported by:
- The Boeing Company
- NSF (CAREER-0430528)
- Link Foundation
- Pixar
- NVIDIA
- Intel
- Donation of Maya licences by Autodesk
Disclaimer
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Copyright notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
![]()
![]()
Unique accesses: