Real-Time Subspace Integration for St.Venant-Kirchhoff Deformable Models
People
Abstract
In this paper, we present an approach for fast subspace integration of reduced-coordinate nonlinear deformable models that is suitable for interactive applications in computer graphics and haptics. Our approach exploits dimensional model reduction to build reduced-coordinate deformable models for objects with complex geometry. We exploit the fact that model reduction on large deformation models with linear materials (as commonly used in graphics) result in internal force models that are simply cubic polynomials in reduced coordinates. Coefficients of these polynomials can be precomputed, for efficient runtime evaluation. This allows simulation of nonlinear dynamics using fast implicit Newmark subspace integrators, with subspace integration costs independent of geometric complexity. We present two useful approaches for generating low-dimensional subspace bases: modal derivatives and an interactive sketching technique. Mass-scaled principal component analysis (mass-PCA) is suggested for dimensionality reduction. Finally, several examples are given from computer animation to illustrate high performance, including force-feedback haptic rendering of a complicated object undergoing large deformations.
Citation
Jernej Barbič and Doug L. James. Real-Time Subspace Integration for St.Venant-Kirchhoff Deformable Models. ACM Transactions on Graphics (SIGGRAPH 2005), August 2005 [BiBTeX]
Project material
- Paper (PDF; 5MB)
- Video:
-
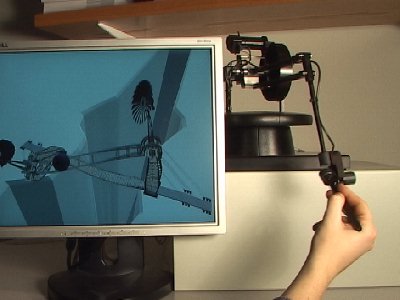
Real-time interactive DEMO (executable!).
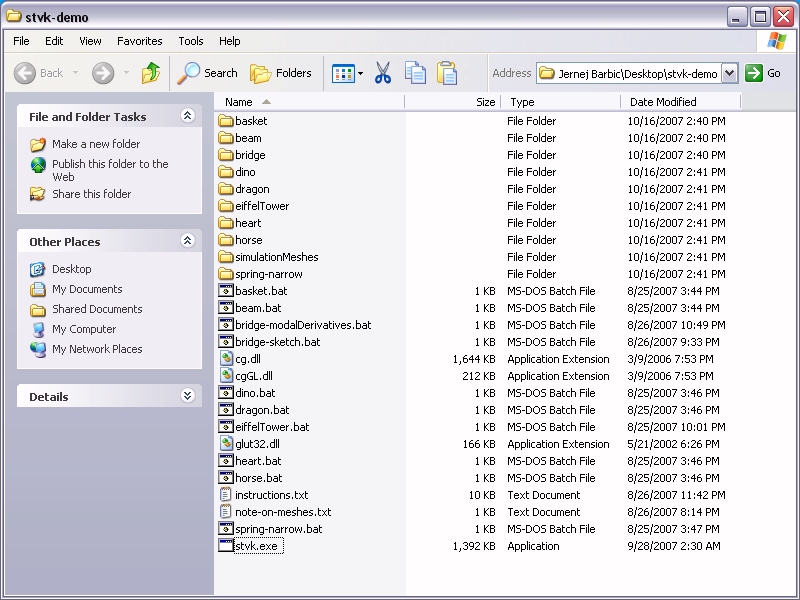
You need the demo core + one or more of the demo data files. Instructions are zipped with the core (therefore, please download and unzip the core first). Designed and tested under Windows XP. Here is how your Windows demo folder should look like after unzipping the demo.
- Demo core (1.2 Mb; version 1.2)
- Heart (6.1 Mb; r=30)
- Eiffel tower (11 Mb; r=20)
- Basket (17 Mb; unconstrained model; r=20)
- Bridge (16 Mb; provides comparison: sketch vs modal derivatives; r=15)
- Dragon (15 Mb; finest model; 27,314 voxels; r=15)
- Horse (11 Mb; r=15)
- Dinosaur (5.8 Mb; r=15)
- 3D Spring (3.1 Mb; r=15)
- Beam (114K; r=15)
- Simulation meshes (4.6 Mb; they are provided for reference and are not necessary to run the demo)
- Or: Everything (91.5 Mb)
- PhD thesis (Jernej Barbič): Real-time Reduced Large-Deformation Models and Distributed Contact for Computer Graphics and Haptics (pdf; 22 Mb)
- Haptic interaction video: ball + bridge
- Multibody dynamics simulation (512 flexible baskets) with large deformations:
- Newmark integration comparison (elastic spoon model, 2005 elements, nonlinear Green strain, linear stress-strain law): full nonlinear simulation (11094 degrees of freedom) versus model reduction nonlinear simulation (12 degrees of freedom):
- SIGGRAPH 2005 presentation slides (videos included; DivX playback codec necessary for DivX videos):
{kind=link}
Related projects
- BD-Tree: Output-Sensitive Collision Detection for Reduced Deformable Models
- Time-critical distributed contact for 6-DoF haptic rendering of adaptively sampled reduced deformable models
- Squashing Cubes: Automating Deformable Model Construction for Graphics
Funding
This research is supported by:
- NSF (CAREER-0430528)
- The Link Foundation
- Pixar
- The Boeing Company
- NVIDIA
Disclaimer
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Copyright notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
Comments, questions to Jernej Barbic. We support web standards; this page is valid XHTML 1.0 Transitional and CSS.