http://graphics.cs.cmu.edu/projects/gdpm/
Building Parts-based Object Detectors via 3D Geometry
Presented at ICCV, 2013
People
...
Abstract
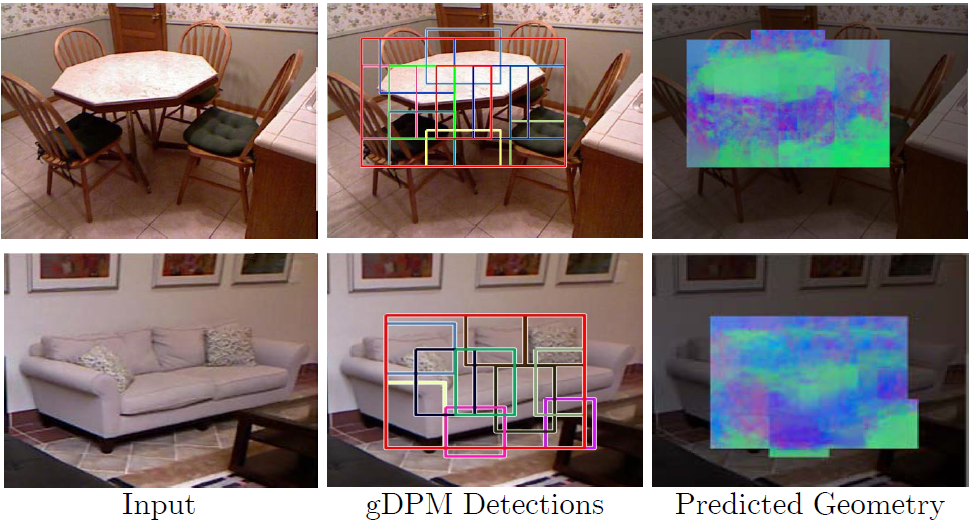
This paper proposes a novel part-based representation for modeling object categories. Our representation combines the effectiveness of deformable part-based models with the richness of geometric representation by defining parts based on consistent underlying 3D geometry. Our key hypothesis is that while the appearance and the arrangement of parts might vary across the instances of object categories, the constituent parts will still have consistent underlying 3D geometry. We propose to learn this geometry-driven deformable part-based model (gDPM) from a set of labeled RGBD images. We also demonstrate how the geometric representation of gDPM can help us leverage depth data during training and constrain the latent model learning problem. But most importantly, a joint geometric and appearance based representation not only allows us to achieve state-of-the-art results on object detection but also allows us to tackle the grand challenge of understanding 3D objects from 2D images.
Paper
|
Abhinav Shrivastava and Abhinav Gupta, Building Parts-based Object Detectors via 3D Geometry, In International Conference on Computer Vision (2013). [Paper (4.2MB)] [Poster (18.5MB)] |
BibTeX
@inproceedings{gdpm_iccv13,
author="Abhinav Shrivastava and Abhinav Gupta",
title="Building Part-based Object Detectors via 3D Geometry",
booktitle="International Conference on Computer Vision",
year="2013"
}
Funding
This research is supported by:
- NSF IIS1320083
- ONR-MURI N000141010934
Comments, questions to Abhinav Shrivastava