Direct Control of Simulated Non-human Characters
People
Abstract
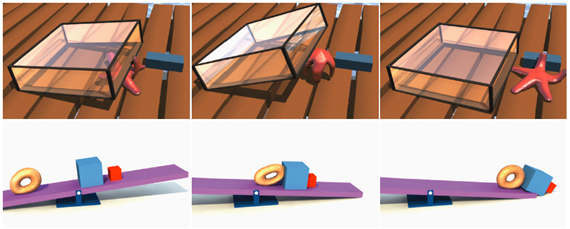
We present an intuitive technique to control simulated self-propelled characters. In our system, a user can control the motions of a character by directly guiding the character to a desired position with mouse drags while a physics simulation determines the character's motion. Based on the user input, the system automatically computes the actuator command that causes the character to follow the user's intention as closely as possible while respecting the underlying physics. This direct control can be more intuitive to use than existing methods, such as controlling character joints to track a given joint trajectory or set of keyframes, especially when physically plausible dynamic motions are desired. We show the power of our method by creating realistic motions of various kinds of characters in our interactive user interface system, including rigid characters, characters with deformable bodies and rigid skeletons, and self locomoting characters whose bodies form closed loops.
Citation
Junggon Kim and Nancy S. Pollard, "Direct Control of Simulated Non-human Characters," IEEE Computer Graphics and Applications, vol. 31, no. 4, pp. 56-65, July/Aug. 2011.
Links
- Paper (2MB) (Visit here for the publication version.)
- Video (final animation results, 47MB)
- Video (screen captured direct control demos, 35MB)
Additional Links
The following videos were created with our user interface system by others.
Copyright notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
|
|
Comments, questions to Junggon Kim. We support web standards; this page is valid XHTML 1.0 Transitional and CSS.