Dexterous TeleManipulation With a Multi-Touch Interface
| Yue Peng Toh | Shan Huang | Joy Lin | Maria Bajze | Garth Zeglin | Nancy S. Pollard |
2012 12th IEEE-RAS International Conference on Humanoid Robots (2012)
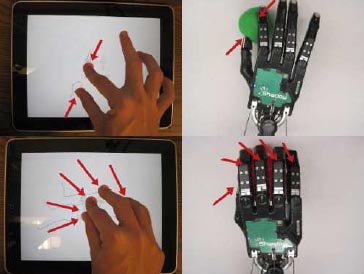
Robust manipulation with a dexterous robot hand is a grand challenge of robotics. Impressive levels of dexterity can be achieved through teleoperation. However, teleoperation devices such as a glove or force reflecting master-slave system can be expensive and can tie the robot down to a restricted workspace. We observe that inexpensive and widely available multi-touch interfaces can achieve excellent performance for a large range of telemanipulation tasks, making dexterous robot telemanipulation broadly accessible. Our key insight is that dexterous grasping and manipulation interactions frequently focus on precise control of the fingertips in a plane. Following this observation, our novel multi-touch interface focuses on reliable replication of planar fingertip trajectories, making previously difficult actions such as grasping, dragging, reorienting, rolling, and smoothing as intuitive as miming the action on a multi-touch surface. We demonstrate and evaluate these and other interactions using an iPad interface to a Shadow Hand mounted on a Motoman SDA10 robot.
Yue Peng Toh, Shan Huang, Joy Lin, Maria Bajze, Garth Zeglin, Nancy S. Pollard (2012). Dexterous TeleManipulation With a Multi-Touch Interface. 2012 12th IEEE-RAS International Conference on Humanoid Robots, 8.
@article{Toh_2012,
author = {Yue Peng Toh and Shan Huang and Joy Lin and Maria Bajze and Garth Zeglin and Nancy S. Pollard},
title = {Dexterous TeleManipulation With a Multi-Touch Interface},
year = {2012},
month = nov,
journal = "2012 12th IEEE-RAS International Conference on Humanoid Robots",
volume = "",
number = "",
pages = "8",
sidebarImage = {http://graphics.cs.cmu.edu/projects/multitouch/teaser.png},
}
