Planning pre-grasp manipulation for transport tasks
Lillian Y. Chang,
Siddhartha S. Srinivasa ,
Nancy S. Pollard
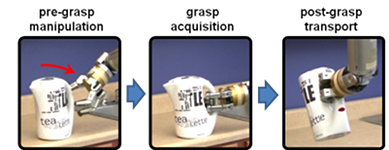
Studies of human manipulation strategies suggest that pre-grasp object manipulation, such as rotation or sliding of the object to be grasped, can improve task performance by increasing both the task success rate and the quality of load-supporting postures. In previous demonstrations, pre-grasp object rotation by a robot manipulator was limited to manually-programmed actions. We present a method for automating the planning of pre-grasp rotation for object transport tasks. Our technique optimizes the grasp acquisition point by selecting a target object pose that can be grasped by high-payload manipulator configurations. Careful selection of the transition states leads to successful transport plans for tasks that are otherwise infeasible. In addition, optimization of the grasp acquisition posture also indirectly improves the transport plan quality, as measured by the safety margin of the manipulator payload limits.
Publication
Planning pre-grasp manipulation for transport tasks.Lillian Y. Chang, Siddhartha S. Srinivasa, Nancy S. Pollard.
IEEE International Conference on Robotics and Automation (ICRA), May 2010. Videos View paper video and additional video examples
Acknowledgements
The authors thank Dmitry Berenson for sharing his planner implementation and the entire Personal Robotics project team at Intel Labs Pittsburgh for discussion and help with the HERB system. We are also grateful to Moshe Mahler and James Chan for modeling the example scenes and rendering the simulation results. Autodesk donated the Maya software package used to render the 3-D animations. This work was supported by the National Science Foundation (CCF-0702443). The material is based upon work partially supported by the National Science Foundation under Grant No. EEC-0540865. L. Y. Chang received support from a NASA Harriet G. Jenkins Pre-Doctoral Fellowship.Copyright notice
This work has been submitted to the IEEE International Conference on Robotics and Automation (ICRA) for publication in May 2010. Copyright © 2010 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all versons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
Comments, questions to Lillian Chang.