(SIGGRAPH 2007)
Alla
Safonova and Jessica K. Hodgins
Alla
Safonova and Jessica K. Hodgins
Abstract
Many compelling
applications would become feasible if novice users had the ability to synthesize
high quality human motion based only on a simple sketch and a few easily
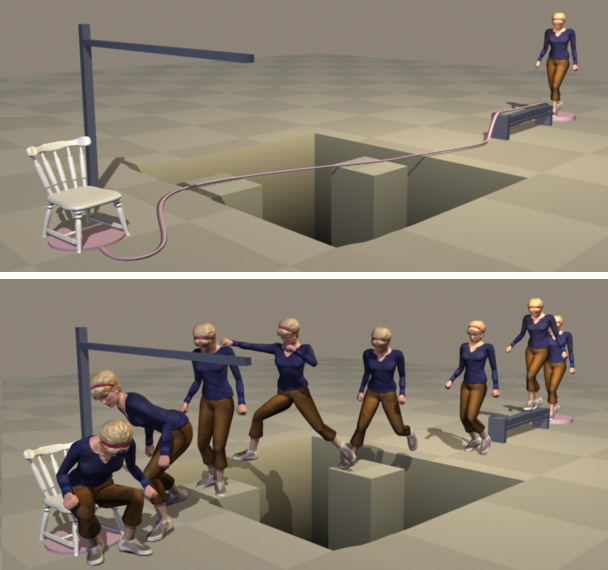
specified constraints. We approach this problem by representing the desired
motion as an interpolation of two time-scaled paths through a motion graph.
The graph is constructed to support interpolation and pruned for efficient
search. We use an anytime version of A* search to find a globally optimal
solution in this graph that satisfies the users specification. Our approach
retains the natural transitions of motion graphs and the ability to synthesize
physically realistic variations provided by interpolation. We demonstrate
the power of this approach by synthesizing optimal or near optimal motions
that include a variety of behaviors in a single motion.
Paper
 |
interpolated_motion_graphs.pdf |
Movie
 |
interpolated_motion_graphs.mov (25MB) |
Supported by the NSF Grant IIS-0326322