|
|
|
|
|
Programming Project #1 15-463: Computational
Photography |
![[SCS dragon logo]](../../scslogo.gif)
IMAGES OF THE RUSSIAN EMPIRE:
Colorizing
the Prokudin-Gorskii
photo collection
Due Date: by 11:59pm, Monday, Sept 12
BACKGROUND
Sergei Mikhailovich
Prokudin-Gorskii (1863-1944) was a man well ahead of his time. Convinced, as early as 1907, that color
photography was the wave of the future, he won Tsar’s special permission
to travel across the vast Russian Empire and take color photographs of everything
he saw. And he really photographed everything: people, buildings, landscapes, railroads,
bridges…thousands of color pictures! His idea was simple: record three
exposures of every scene onto a glass plate using a red, a green, and a blue
filter. Never mind that there was no way to print color photographs until much
later – he envisioned special projectors to be installed in
“multimedia” classrooms all across
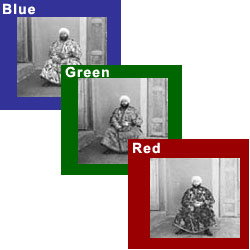
OVERVIEW
The goal of this assignment is
to take the digitized Prokudin-Gorskii glass plate images such as this one and,
using image processing techniques, automatically produce a color image with as
few visual artifacts as possible. In
order to do this, you will need to extract the three color channel images,
place them on top of each other, and align them so that they form a single RGB
color image. We will assume that a
simple x,y translation model is sufficient for proper alignment. However, the full-size glass plate images are
very large, so your alignment procedure will need to be relatively fast and
efficient.
DETAILS
 A few
of the digitized glass plate images (both hi-res and low-res versions) will be placed
in the following directory (note that the filter order from top to bottom is
BGR, not RGB!): data/.
Your program will take a glass plate image as input and produce a single
color image as output. The program
should divide the image into three equal parts and align the second and the
third parts (G and R) to the first (B).
For each image, you will need to print the (x,y) displacement vector
that was used to align the parts.
A few
of the digitized glass plate images (both hi-res and low-res versions) will be placed
in the following directory (note that the filter order from top to bottom is
BGR, not RGB!): data/.
Your program will take a glass plate image as input and produce a single
color image as output. The program
should divide the image into three equal parts and align the second and the
third parts (G and R) to the first (B).
For each image, you will need to print the (x,y) displacement vector
that was used to align the parts.
The
easiest way to align the parts is to exhaustively search over a window of
possible displacements (say [-15,15] pixels), score each one using some image
matching metric, and take the displacement with the best score. There is a
number of possible metrics that one could use to score how well the images
match. The simplest one is just the L2 norm also known as the Sum of Squared
Differences (SSD) distance which is simply sum((image1-image2).^2). Another is normalized correlation. Note that in this particular case, the images
to be matched do not actually have the same brightness values (they are
different color channels), so a cleverer metric might work better.
Exhaustive
search will become prohibitively expensive if the pixel displacement is too
large (which will be the case for high-resolution glass plate scans). In this case, you will need to implement a
faster search procedure such as an image pyramid. An image pyramid represents the image at
multiple scales (usually scaled by a factor of 2) and the processing is done
sequentially starting from the coarsest scale and going down. It is very easy
to implement by adding recursive calls to your original single-scale
implementation.
The
above directory has skeleton Matlab code that will help you get started.
BELLS & WHISTLES
Using
your digital camera, try to repeat Prokudin-Gorskii’s approach to color
photography. Switch your camera to
black&white mode (or use rgb2gray in Matlab), and take 3 version of the
same scene (helpful to use tripod) with three different filters, roughly corresponding
to Red, Green, and Blue. Don’t worry too much about the quality of the
filters (these plastic binder separators might work fine). Make a composite from the three color
channels and compare it to the real color photograph. In general, your filters won’t
correspond to real RGB so your colors will be off. Consider a way to use a known object in the
scene to calibrate your filters and make them correspond to the correct colors
(e.g. white balance).
The borders of the photograph
will have strange colors since the three channels won’t exactly
align. See if you can devise an
automatic way of cropping the border to get rid of the bad stuff. The idea is that, the information in the good
parts of the image generally agrees across the color channels, whereas at
borders it does not.
SCORING
The
assignment is worth 100 points. You will
get 60 points for a single scale implementation demonstrating successful
results on the low resolution images.
You will get 40 more points for a multiscale pyramid implementation,
showing that you can handle larger input images (depending on the memory of
your machine, you might still not be able to run on the full resolution images,
in which case, show results on an intermediate resolution that you machine can
handle). Up to 20 points of extra credit will be assigned for any Bells and
Whistles (either suggested or your own).
WHAT TO TURN IN
You
will need to create a web page showing the results of this assignment and
describing any of the extras that you have done. Show your results on all images that were
provided, plus a few others of your own choosing from the LoC collection. Additionally, you will need to hand in all of
your code to a specified directory (not publicly readable). I will have more information about the
appropriate directories for the web page and the code.