Momentum-Mapped Inverted Pendulum Models for Controlling Dynamic Human Motions
| Taesoo Kwon | Jessica Hodgins |
ACM Transactions on Graphics (February 2017)
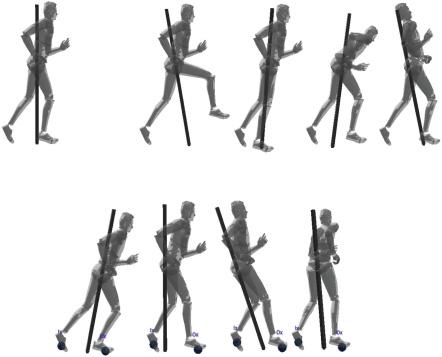
Designing a unified framework for simulating a broad variety of human behaviors has proven to be challenging. In this article, we present an approach for control system design that can generate animations of a diverse set of behaviors including walking, running, and a variety of gymnastic behaviors. We achieve this generalization with a balancing strategy that relies on a new form of inverted pendulum model (IPM), which we call the momentum-mapped IPM (MMIPM). We analyze reference motion capture data in a pre-processing step to extract the motion of the MMIPM. To compute a new motion, the controller plans a desired motion, frame by frame, based on the current pendulum state and a predicted pendulum trajectory. By tracking this time-varying trajectory, the controller creates a character that dynamically balances, changes speed, makes turns, jumps, and performs gymnastic maneuvers.
Taesoo Kwon, Jessica Hodgins (February 2017). Momentum-Mapped Inverted Pendulum Models for Controlling Dynamic Human Motions. ACM Transactions on Graphics, 36(1).
@article{Hodgins:2017:DOE,
author={Taesoo Kwon and Jessica Hodgins},
title={Momentum-Mapped Inverted Pendulum Models for Controlling Dynamic Human Motions},
journal={ACM Transactions on Graphics},
volume={36},
number={1},
year={February 2017},
}
